ThreadSky
About ThreadSky
Log In
cpaxton.bsky.social
•
1 day ago
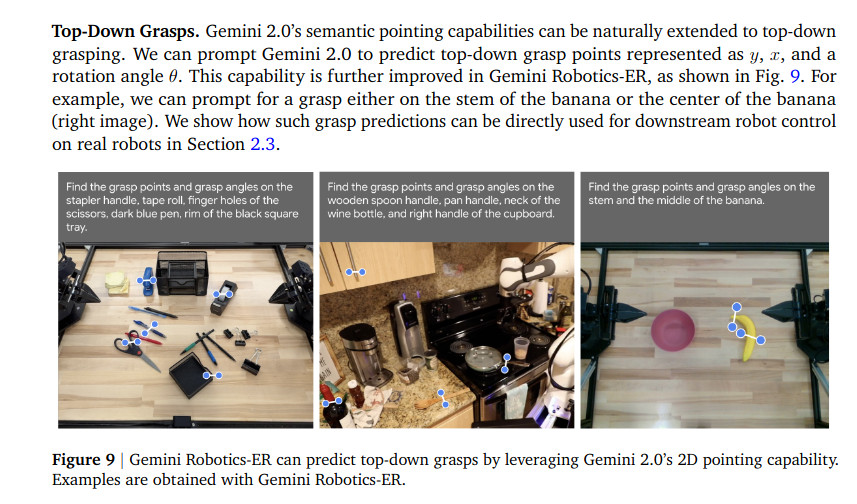
This on it's own is a super useful capability for roboticists. My top request is and always has been just for a grasping model that *works*
Comments
Log in
with your Bluesky account to leave a comment
No comments yet
Posting Rules
Be respectful to others
No spam or self-promotion
Stay on topic
Follow Bluesky's terms of service
×
Reply
Post Reply

Comments