
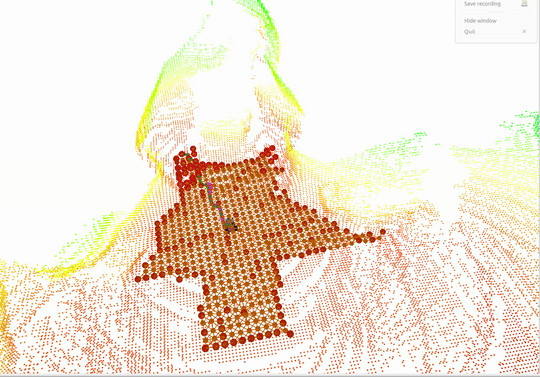
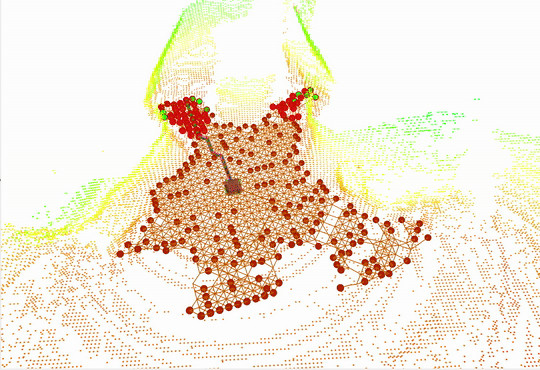
1/3 We have released our #multi-robot #exploration #planner for #space applications! Designed for complex unconstrained environments, it mixes a local grid with a global graph planner, with the global graphs being synchronised when robots are in comms range. #field #robotics #autonomous #systems
1 / 2
Comments
Project page: https://mistlab.ca/MGGPlanner/
Paper: https://ieeexplore.ieee.org/iel8/7083369/7339444/10847879.pdf
Code: https://github.com/MISTLab/MGGPlanner
Video: https://youtu.be/Fv8B0Ml0KCY?si=gJrrq5WZpRohCbBS